Neigungssteuerung
Zwei Achsen werden über Sensorsignale verarbeitet. In den Quellen sind unter anderem Delta-ADC, optionaler Moving-Average-Filter, Tilt-Axis-Logik und 7-Segment-Ausgabe aufgebaut.
University Lab | Winter 2024/25
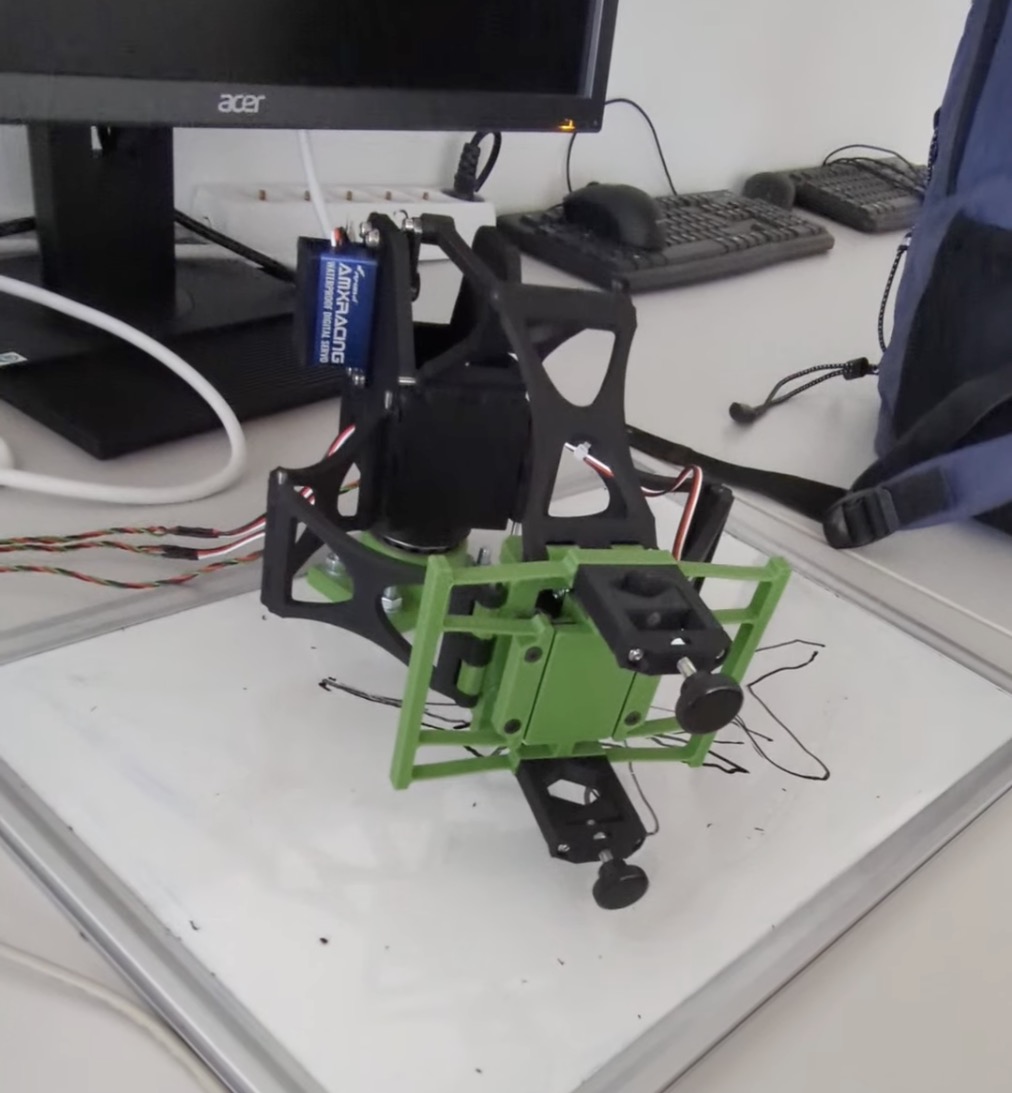
FPGA-basiertes Steuerungssystem in VHDL für eine mechanische Robotplattform. Der Fokus lag auf digitalem Hardwaredesign, Control Logic und Signalverarbeitung auf echter FPGA-Hardware.
Projektumfang
Zwei Achsen werden über Sensorsignale verarbeitet. In den Quellen sind unter anderem Delta-ADC, optionaler Moving-Average-Filter, Tilt-Axis-Logik und 7-Segment-Ausgabe aufgebaut.
Taster und Schalter werden synchronisiert und entprellt. Ein Debug-/Button-Control-Pfad erlaubt kleine oder größere Schrittweiten und die Auswahl der aktiven Achse.
Ein Command Processor liest eine Command-ROM mit 61 Bewegungsbefehlen. Die FSM durchläuft Warte-, Initialisierungs-, Zeichen- und Abschlusszustände.
Die mechanische Robotplattform wurde vom University Lab bereitgestellt. Die Projektarbeit lag in der digitalen Hardwarebeschreibung, im Zusammenspiel der VHDL-Module und in der Umsetzung auf FPGA.
RTL-Aufbau
Die finalen Quellen zeigen ein integriertes Top-Level um `board`, das Neigungssteuerung, Command Processing und Servo-Ausgabe verbindet. Für asynchrone Eingaben werden Synchronizer und Debounce-Logik eingesetzt.
Entwicklung
Verifikation
Neben der Quartus-Implementierung wurden zentrale Module mit Testbenches abgesichert. In den finalen Übungen liegen unter anderem diese Testbenches vor: